Salut,
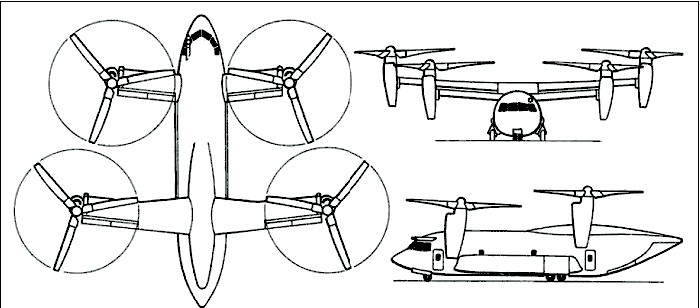
En fait, je démontre juste l'analogie entre ce quadri et les tilt-rotors existants, Le V-22 ne fait pas que du VTOL, ce n'est d'ailleurs pas sa meilleur prestation;
Il est capable de basculer ses rotors comme sur le quadri pour gagner de la vitesse avant de basculer en phase de vol avion(full speed avec une méga traînée).
Pour le X44, je pense qu'une KK2 peut faire la même chose, avec une radio programmable : désactiver le self-level quand la propulsion est basculée.
Ou alors en changeant le firmware par un openaero.
Pour le principe, il suffit seulement d'effectuer une rotation de quelques degrés les rotors vers l'avant pour prendre de la vitesse et l'inverse pour ralentir,
comme sur un hélico en fait ...
Au neutre des manches les rotors restent droits et la machine est un multi comme un autre.
Sais-tu s'il s'agit d'un programme radio ou carte(en fonction de la valeur du manche <50% passage en mode tilt, >50 mode quadri normal=inclinaison de l'appareil)
ou si le manche de profondeur gère uniquement le basculement des moteurs.
Par contre ayant eu une moto qui faisait 0-100 en 3.6s j'ai un doute sur la véracité des perfs de cette machine,
après cela n'est qu'un détail, je pense que l'essentiel est dans le tilt rotors ...
Bon tu nous en monte un quand, qu'on puisse juger par nous même ?
On pourrait alors comparer avec celui de Jonathan pour la vitesse, à lipo égale.
Cdlt,
SoS-Software.